Raspberry piで2足歩行ロボットの作成③「段ボールで2足歩行ロボットの骨格を作ってみる」
2021-07-22
今回は、サーボモーターを組み立てて「ロボットの骨格」を作成したいと思います。
意外と段ボールでもいけちゃうので、私と同じロボット初心者の方は、参考にして頂ければ幸いです。
初めに
ざくっとデザイン
.png)
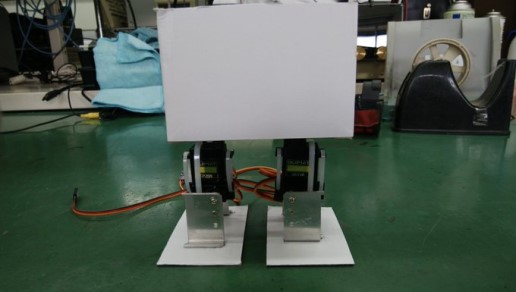
こんな感じでいきたいので、これを段ボールなどで作成します。
頭の部分は、ラズパイとモバイルバッテリ、モータードライバがちょうど収まる大きさにします。
要のサーボモーター部分ですが、下図のように「タイラップでまとめる方法」を採用します。
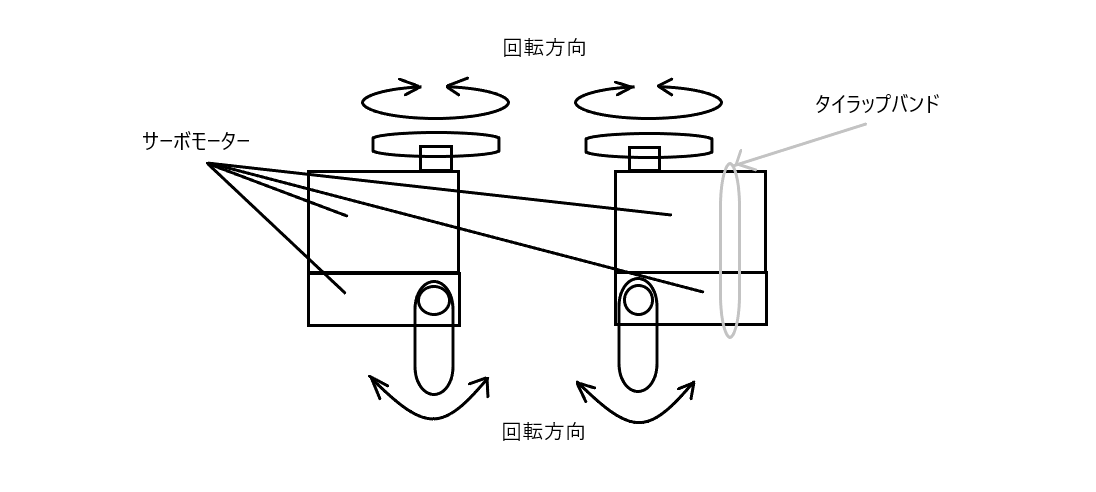
超お手軽に、足のサーボ部分が完成します。
上段のサーボは、胴体(今回でいう頭)を回転させます。
下段のサーボは、足の水平角度を変化させます。
この4つのサーボの組み合わせで、前進、後退、旋回などの歩行が可能になります。
このサーボを段ボールにくっつけた状態は、下図のようにしたいと思います。

上部サーボモーターの回転する羽?(正式名称不明)プラッチックのやつにロックタイトなどで段ボールと接着させます。
下段のサーボモーターは、頭の負荷がもろに影響してくるので、適度な鉄板を使って、それをサーボの羽とねじ止めしておきます。足の段ボールとは、ロックタイトで接着させます。
ボンドでの接着は少々強引ですが、なんせ段ボールなのでよくくっつきます!(そーいうことではないか?。。)
とにかく、ボンドでも無事歩いているので、遊ぶ程度ならこれで問題ないでしょう。
可能なら、足の鉄板と段ボール、胴体とサーボの羽の部分で接着している部分を、ねじ止め出来ればなお良いかと思います。
段ボールロボの骨格作成
サーボモーター
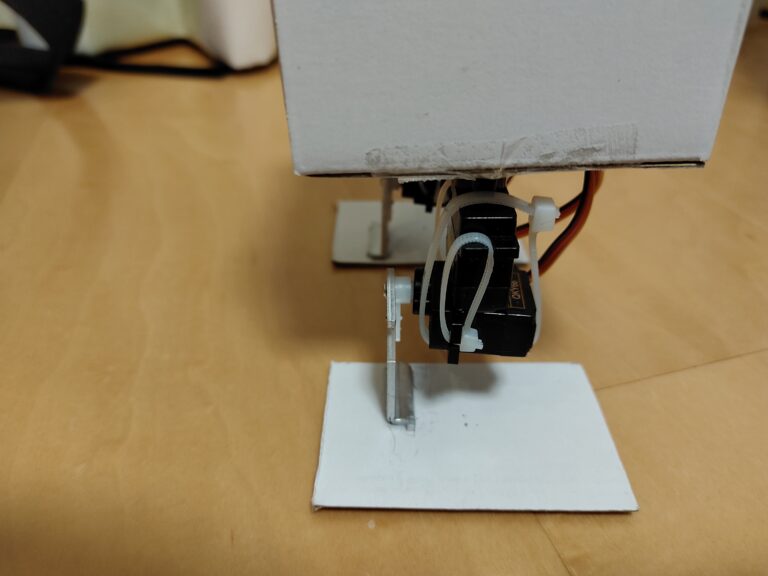
前途した図のとおり、4つのサーボを2個ずつつなげて、2パターンのサーボを作成します。
3つほどタイラップを使えば、うまく固定できるようです。
下の写真を参考にして下さい。

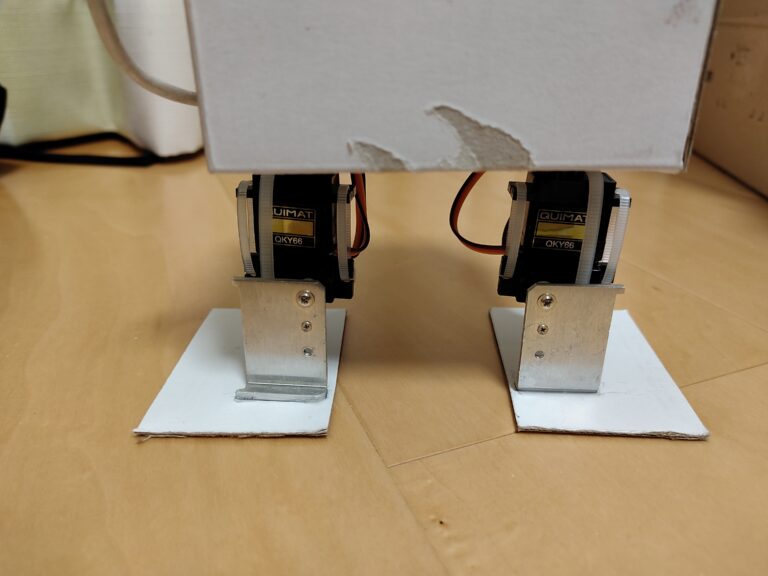
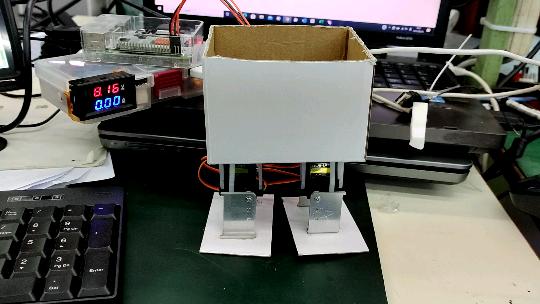
足の作成
下段のサーボに鉄板をねじ止めします。
その後、鉄板と足となる段ボールをボンドで接着します。※段ボールは固めのものがよいです。
固めの段ボールとか、適度な鉄板って、我ながらとんでもなく無茶な説明ですが、まあ身近ところを探せばなにか最適なものが見つかると思います!(適当でスミマセン)
下の写真を参考にして下さい。(胴体ついちゃってますけど。)
胴体(頭)と接続
上部のサーボモーターの羽と、胴体となる頭をボンドで接着させます。
これで一応出来上がりですね。
次回は、今回組み上げたロボットのサーボの調整、モーションのプログラムを作成したいと思います。