Raspberry piで2足歩行ロボットの作成⑥【完成】「ラズパイ、電源、ケーブル、サーボモータードライバの収納」
Raspberry pi
2021-07-23
2021-07-23
今回は胴体となる頭にラズパイや電源を収納して、2足歩行ロボットを完成させたいと思います。
簡易的なロボットになりましたが、ラズパイを使った無線での2足歩行ロボは巷にあまり無い(多分。。)と思いますので、この6回に渡りまとめてきた記事が、なにか少しでもお役に立てたなら嬉しい限りです。
加工
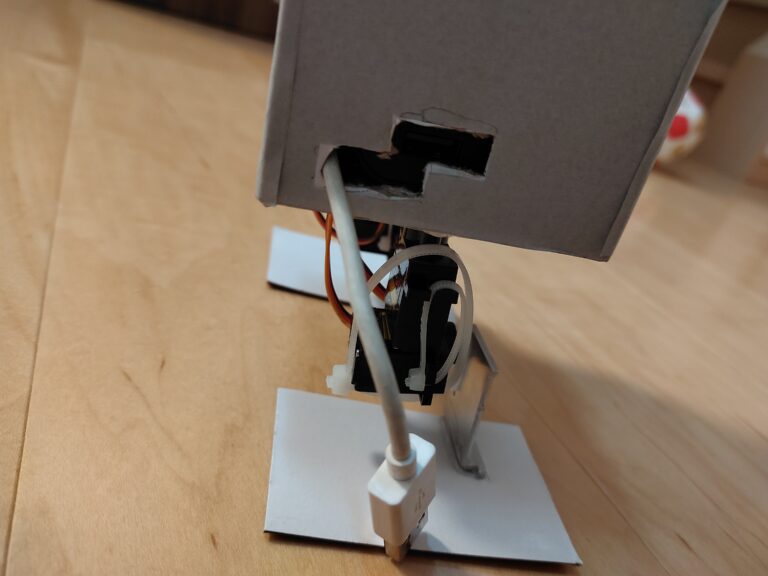
ケーブル通しの穴
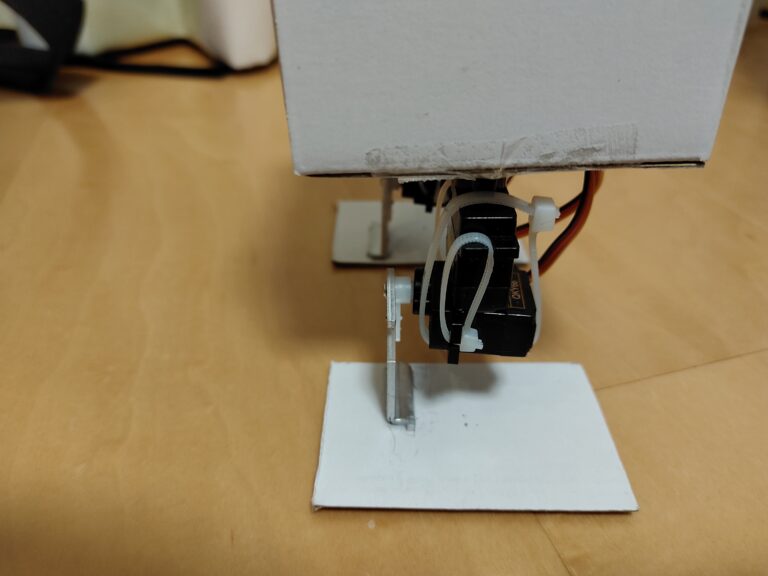
サーボモーターのケーブルを胴体に収納させたいので、胴体の裏面(足側の後ろ辺り)に適当な穴を開け、そこからサーボモーターのケーブルを引き込みます。
また、電源にスマホ用のポータブル充電器を使用する場合は、胴体の中でUSBケーブルの取り回しがきつくなると思われますので、そういった場合は胴体側面に適当な穴を開けて、USBケーブルを取り回します。
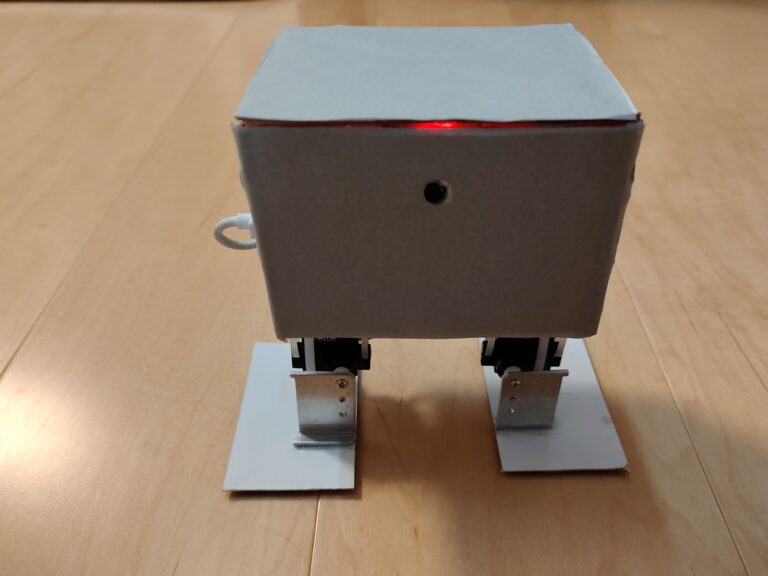
装飾
と言えば大げさですが、「包装紙」などを胴体に貼り付け、少しでも見栄えを良くします。段ボールの悲しい所ですね。
ケーブルの通し穴や、カメラ部には穴を開けます。
ハードウェアの収納
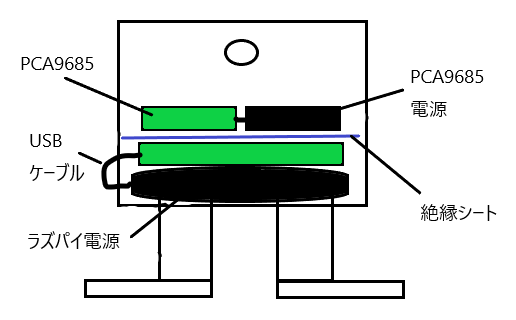
図のような感じでハードウェアを収納します。
モバイルバッテリは重量がけっこうあるので、乾電池を使用した方がいいかもしれません。
完成
最後に電源投入し、動作テストをします。
ラズパイはモニタに接続できないので、SSHでPCやスマホからターミナルを直接操作して、webiopiを起動させます。
あとはラズパイのwebサーバーのIPにブラウザからアクセスして、歩行テストを行います。
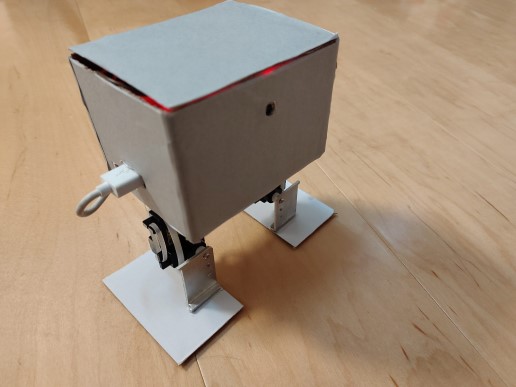
完成した2足歩行ロボットはこちらです。↓
ラズパイの電源を落とす時も、SSHでシャットダウンのコマンドを打てばOKです。
コメントを残す
コメント一覧
コメントはまだありません⇧