ラズパイで2足歩行ロボットを作ってみる「構想編」
Raspberry pi
2021-07-22
2021-07-22
.png)
全体的な構成
ブラウザをリモコン代わりにロボを歩かせる
プログラム
下図のような仕組みで開発します。
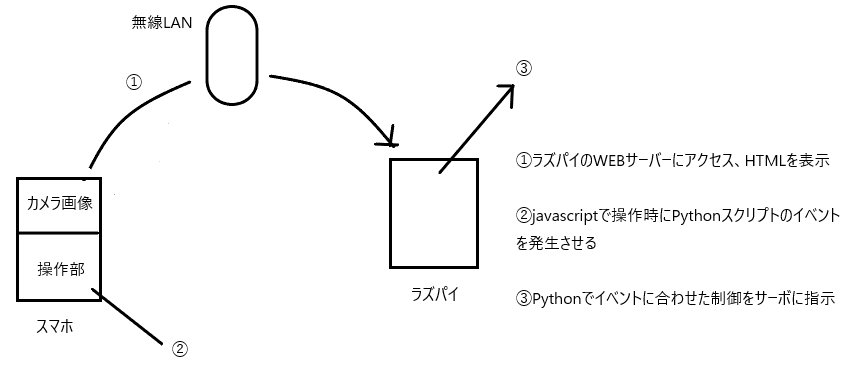
ハードウェア
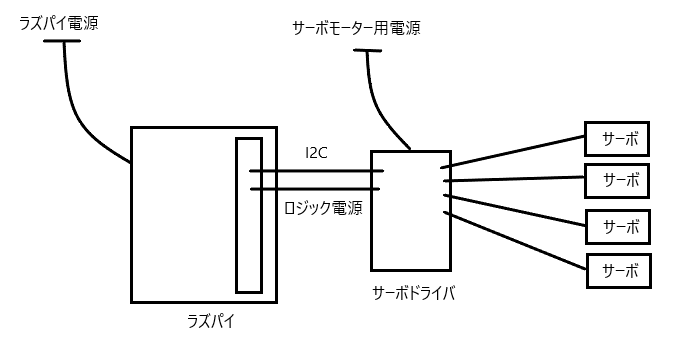
サーボモーターはpwmで角度を制御しますが、ラズパイのハードウェアpwm制御系統は2つしかありません。(比較的正確にpwm制御できるもの)
ソフトウェアpwmなら多く実装されていますが、動作が不安定になります。
よって、サーボモーターを最大で16個ハードウェアpwmで動作させることができる専用ドライバを使用します。
ラズパイからはこれにI2Cの半二重通信の接続を行って、ドライバを制御します。
ロボット自体は手乗りサイズ程のものを考えており、足は片方2個ずつ、手は無しで実装してみます。
4つのサーボを制御ですね。
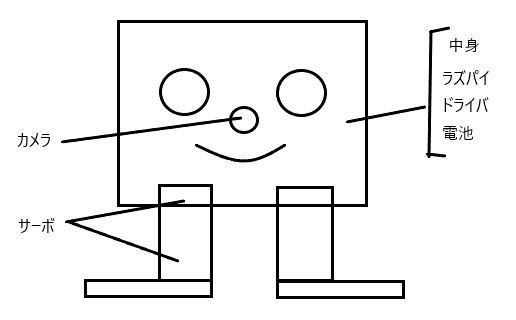
外観
とりあえず段ボール
とりあえず段ボールで見た目を設計します。
コメントを残す
コメント一覧
コメントはまだありません⇧