M5stackで2足歩行ロボットの作成④「micropythonでPCA9685を制御してロボットのモーションを作成」
M5Stack
2021-07-23
2021-07-23
今回は以前に作成したmicropythonでのPCA9685制御プログラムで2足歩行ロボットのモーションを作成したいと思います。
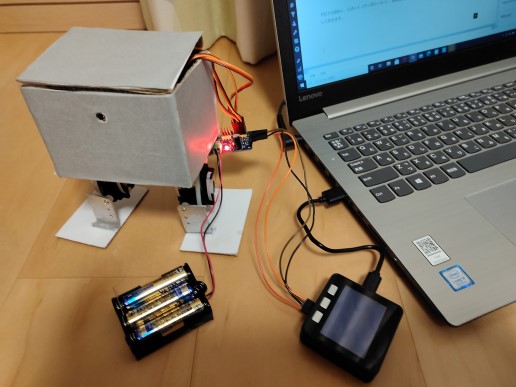
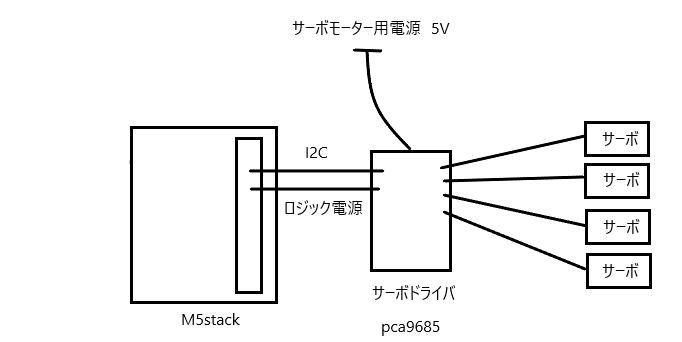
それでは初めに、ロボット(サーボモーター)、pca9685,M5stack,pcを繋いで、モーションの確認が出来るようにしておきます。
モーションテスト環境構築
テンプレのように準備ができれば、第2回で作成した「mtest.py」のプログラムにモーションのプログラムを追加していきます。
mtest.py
from machine import Pin,I2C
import time
import servo
import pca9685
i2c = I2C(0, scl=Pin(22), sda=Pin(21))
s = servo.Servos(i2c)
def set():
s.position(0, 97)
time.sleep_ms(1000)
print('a')
s.position(1, 90)
time.sleep_ms(1000)
print('b')
s.position(2, 100)
time.sleep_ms(1000)
print('c')
s.position(3, 90)
time.sleep_ms(1000)
print('c')
def fw():
s.position(3, 70)
s.position(1, 70)
time.sleep_ms(500)
s.position(0, 77)
s.position(2, 80)
time.sleep_ms(500)
s.position(3, 90)
s.position(1, 90)
time.sleep_ms(500)
s.position(3, 110)
s.position(1, 110)
time.sleep_ms(500)
s.position(0,117)
s.position(2, 120)
time.sleep_ms(500)
s.position(3, 90)
s.position(1, 90)
time.sleep_ms(500)
def bk():
s.position(3, 110)
s.position(1, 110)
time.sleep_ms(500)
s.position(0, 77)
s.position(2, 80)
time.sleep_ms(500)
s.position(3, 90)
s.position(1, 90)
time.sleep_ms(500)
s.position(3, 70)
s.position(1, 70)
time.sleep_ms(500)
s.position(0,117)
s.position(2, 120)
time.sleep_ms(500)
s.position(3, 90)
s.position(1, 90)
time.sleep_ms(500)
def lt():
s.position(3, 40)
s.position(1, 60)
time.sleep_ms(500)
s.position(0, 117)
time.sleep_ms(500)
s.position(3, 90)
time.sleep_ms(500)
s.position(1, 90)
time.sleep_ms(500)
s.position(0, 97)
time.sleep_ms(500)
def rt():
s.position(3, 120)
s.position(1, 140)
time.sleep_ms(500)
s.position(2, 80)
time.sleep_ms(500)
s.position(1, 90)
time.sleep_ms(500)
s.position(3, 90)
time.sleep_ms(500)
s.position(2, 100)
time.sleep_ms(500)
while(True):
print('0/set 1/fw 2/lt 3/rt 4/bk')
move = int(input('set No please:'))
if move == 0:
set()
elif move == 1:
fw()
elif move == 2:
lt()
elif move == 3:
rt()
elif move == 4:
bk()
else:
exit
関数にそれぞれ前進、後退、左旋回、右旋回、セットポジション、のモーションを作成しました。
第二引数の角度については、使用するサーボモーターで誤差が生じるため、微調整を繰り返しながらいい感じの数値に修正していきます。
このプログラムを実行すると、set No please: の表示の後でシェルに番号を入力出来るので、動作させたい箇所の関数の番号を入力すればそれぞれのモーションの確認が可能になっています。
実行すると、下のような感じになります。↓
次回はこのプログラムを、前回作成したWEBサーバーのプログラムに埋め込みたいと思います。
コメントを残す
コメント一覧
コメントはまだありません⇧