M5stackで2足歩行ロボットの作成①「開発環境の構築」
2021-07-23

それでは初めに、開発環境を構築します。
M5stackはArduinoと同じようなマイコンボードであり、raspberrypiのようなシングルコンピューターボードように「OS」が入っていません。したがって、PCで作成したプログラムをM5stackに転送し、実行させて開発を進める形になります。
今回は「micropython」でプログラムを作成しようと思いますので、その環境構築についてまとめたいと思います。
開発環境構築概要
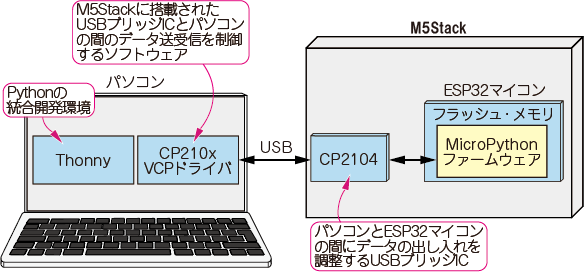
とても分かりやすいサイトがありましたので、ZEPエンジニアリング様より画像を引用させて頂きました。
M5stackは、ESP32(Wi-Fi、Bluetoothを内蔵するマイコン)を搭載していて、フラッシュメモリもそこにあります。
pythonはコンパイル方式(高水準言を機械語に変換)がインタプリタ式になるので、フラッシュメモリに書き込んだpythonプログラムの実行には、pythonのファームウェア(インタプリタ)が必要になります。
C言語はコンパイラ方式のため、コンパイルしたバイナリデータをフラッシュロムに書き込んでいると思いますので、ボード側にいコンパイラは必要無い所が異なる所ですね。
PCとM5stackの接続には専用のUSBドライバ(CP210XVCPドライバ)が必要で、PCにインストールする事が必須です。
また、pythonのエディタはThoony等のIDEをPCにインストールして使います。なお、Thoonyを使えば作成したプログラムの実行だけでなく、M5stackに保存する事も可能になります。
以上をまとめれば、
①専用のUSBドライバ(CP210XVCPドライバ)をPCにインストール
②micropythonのファームウェアをM5stackに書き込む
③Thoony等のIDEをPCにインストール
この3つが最低限必要な項目となります。
各種ツールのインストール、設定
前途したツールのインストール、設定を行います。
ここもZEPエンジニアリング様の力を借りる事にします。こちらのサイトに飛んで頂き、説明の通り進めてもらえば万事OKでございます。(丸投げ。。)↓
https://www.zep.co.jp/utaguchi/article/z-m5manual-da1/
ファームウェア書き込みのツールの設定など、事細かく説明されているので非常に分かりやすいです。
ファームウェアの書き込みが面倒なら公式のM5Burner
公式のページにM5BurnerというM5Stackのファームウェアを書き込むソフトがあります。
こちらはM5stackを工場出荷状態に戻す為のツールのようですが、micropythonのファームウェアを書き込んでくれるものもある(というよりmicropythonで初期コンテンツが作られている)ので、それを選べばワンクリックで済みます。
リンクはこちら↓
https://shop.m5stack.com/pages/uiflow
M5BurnerをPCにインストール後、USBでM5stackをつないで実行すればOKです。
以上で開発環境は整いましたので、次回以降、ロボットの作成に入りたいと思います。